Hexapod 🦗
Estimated reading time: 1 minutes
Engineered a compact hexapod robot with custom-designed 3-DOF legs, optimizing form factor and torque efficiency through iterative prototyping in Fusion 360. Built a staged validation system using a 3-leg test rig to refine control, power distribution, and servo performance before scaling. Designed a scalable ESP32-based control architecture, with future extensions into inverse kinematics, gait generation, and autonomous navigation.
Get in Touch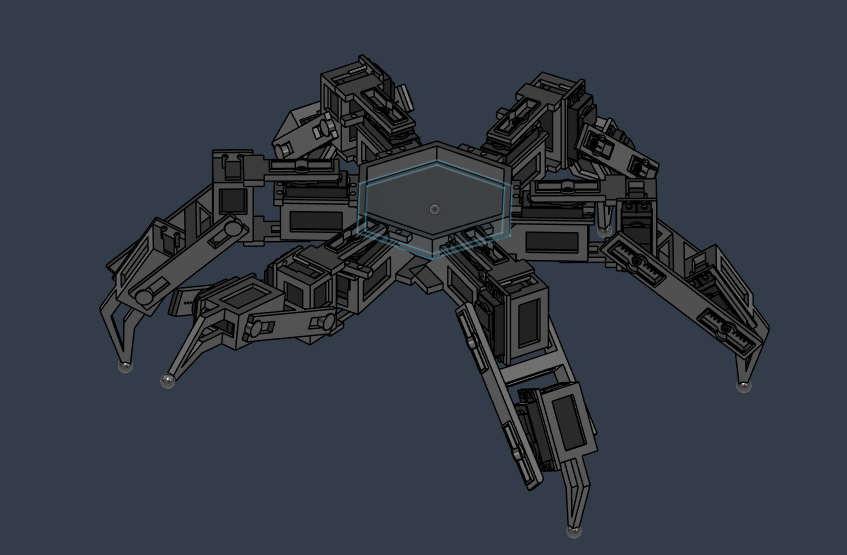
What I Learned
- Architecting an 12-DOF hexapod with custom 2-DoF legs (100 mm reach), focusing on modular design and stable locomotion over uneven terrain.
- Developing kinematic control with analytical/numerical IK and implementing tripod & wave gaits for synchronized, statically stable multi-leg coordination.
- Building real-time embedded control (ESP32 , PWM multi-servo actuation) with trajectory planning and sensor feedback (IMU/ultrasonic), addressing actuator and power constraints.
Skills Leveled Up
Robotics 90%
Arduino 85%
Kinematics 80%